1 min to read
씬 뎁스를 이용한 포인터 클라우드 디스플레이
Displaying a Point Cloud Using Scene Depth

ReadMe
아래 내용은 Developer apple 에서 제공하는 Displaying a Point Cloud Using Scene Depth 포스트 내용을 번역했습니다.
Overview
디바이스의 LiDAR 스캐너로부터 물리적 환경 속 여러 객체에서 측정된 Point cloud는 Depth cloud 라는 앱에서 확인할 수 있습니다. 3D 그래픽 장치인 Metal을 사용했음을 참고해주세요. 환경에서 미터 단위로 거리를 측정한 depthMap으로 물리적 환경에 가상의 객체를 그릴 수 있습니다. 최종 재구성된 포인트 클라우드와 함께 말이죠. Depth cloud는 ARKit의 카메라 이미지로부터 클라우드에 이미지 capturedImage를 씌워줍니다.
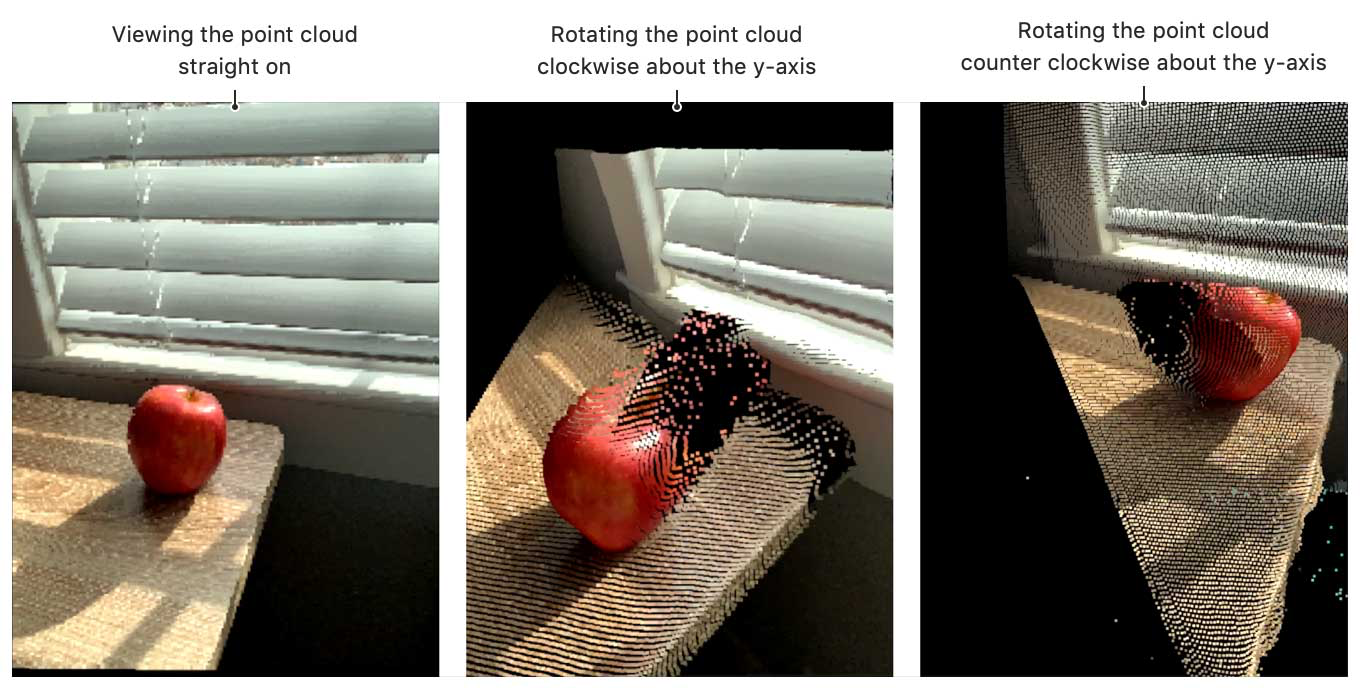
모든 뎁스 맵의 연결점들(클라우드의 모든 점들)은 샘플 앱이 카메라 이미지의 관련된 픽셀들을 체크해줍니다. 그리고 점들에게 픽셀의 값을 넣어줍니다. 사용자가 포인트 클라우드를 직접 볼 때는 앱이 카메라 피드와 동일하게 나타납니다. 클라우드의 3D 형상을 증명하기 위해 샘플 앱은 유저가 회전시킬 수 있습니다.
아래 그림은 단일 촬영을 이용한 포인트 클라우드를 보여줍니다. y 축을 기준으로 돌려졌는데 검은 영역은 깊이와 컬러 정보가 부족해서 그렇습니다.
앱에서는 깊이 컨피던스 값(confidenceMap)을 알 수 있습니다. 또한 앱은 뎁스버퍼를 크게 할 수도 있고 ARKit의 스무스 뎁스 옵션(smoothedSceneDepth)도 있습니다. 사용자는 라이브 모드를 적용할 수도 있으니 여러 셋팅들을 통해서 경험을 만들어봅시다.
- Note WWDC20 session 10611: Explore ARKit 4는 클라우드의 포인트들을 누적하는 이전 버전의 샘플 앱을 참조합니다. 원 버전에 관심이 있으시면 깃 레포지토리의 초기화 커밋의 루트 폴더를 참고해주세요. —
깊이 값을 이용하여 마스킹이나 안개처리를 하고싶으시면 여기를 참고해주세요.
Set Up a Camera Feed
카메라 피드를 디스플레이하기 위하여 샘플 프로젝트는 SwiftUI Scene을 단일 윈도우가 들어간 body와 함께 정의합니다. 아래 코드와 함께 MetalDepthView라는 single View 타입이 있습니다.
@main
struct PointCloudDepthSample: App {
var body: some Scene {
WindowGroup {
MetalDepthView()

Comments